DOWNLOAD ABSTRACT
AIM:
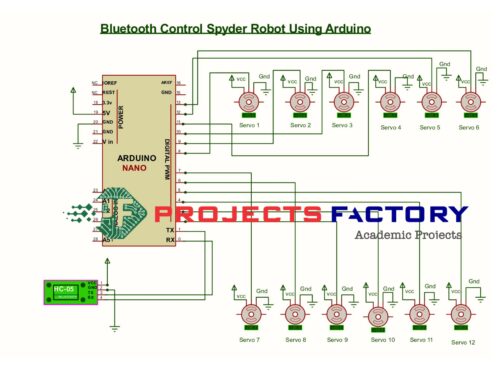
Design and development of Bluetooth control Spider robot(Quadruped Spider Robot) using Arduino.
PURPOSE:
The rapid evolution of robotics and wireless communication technologies has paved the way for innovative applications in various domains, including surveillance and exploration. This paper presents the design and implementation of a Bluetooth-controlled Spider robot, an arachnid-inspired robotic platform, using Arduino microcontrollers. The Spider robot is equipped with Bluetooth, allowing it to navigate challenging terrains.
DESCRIPTION:
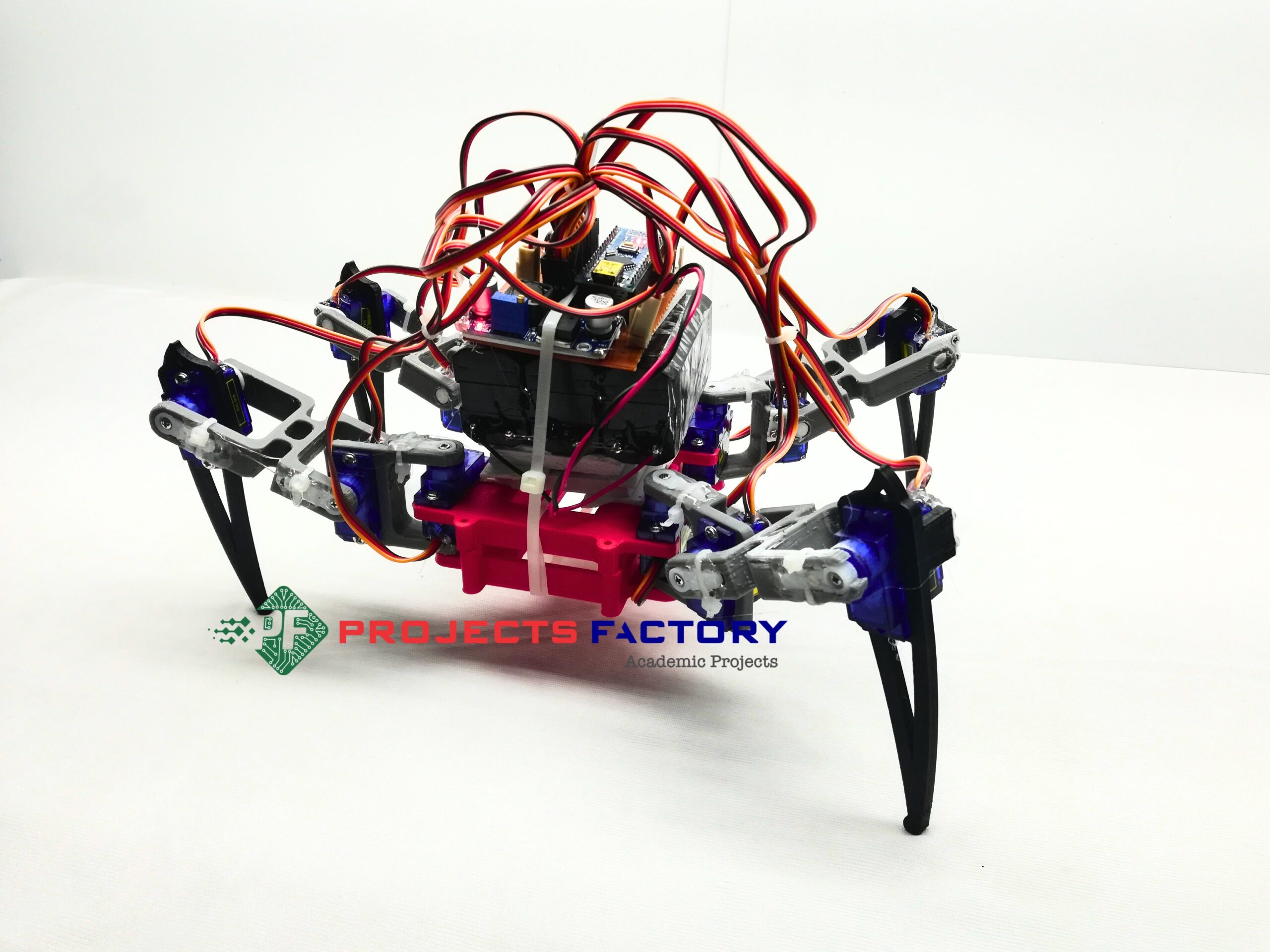
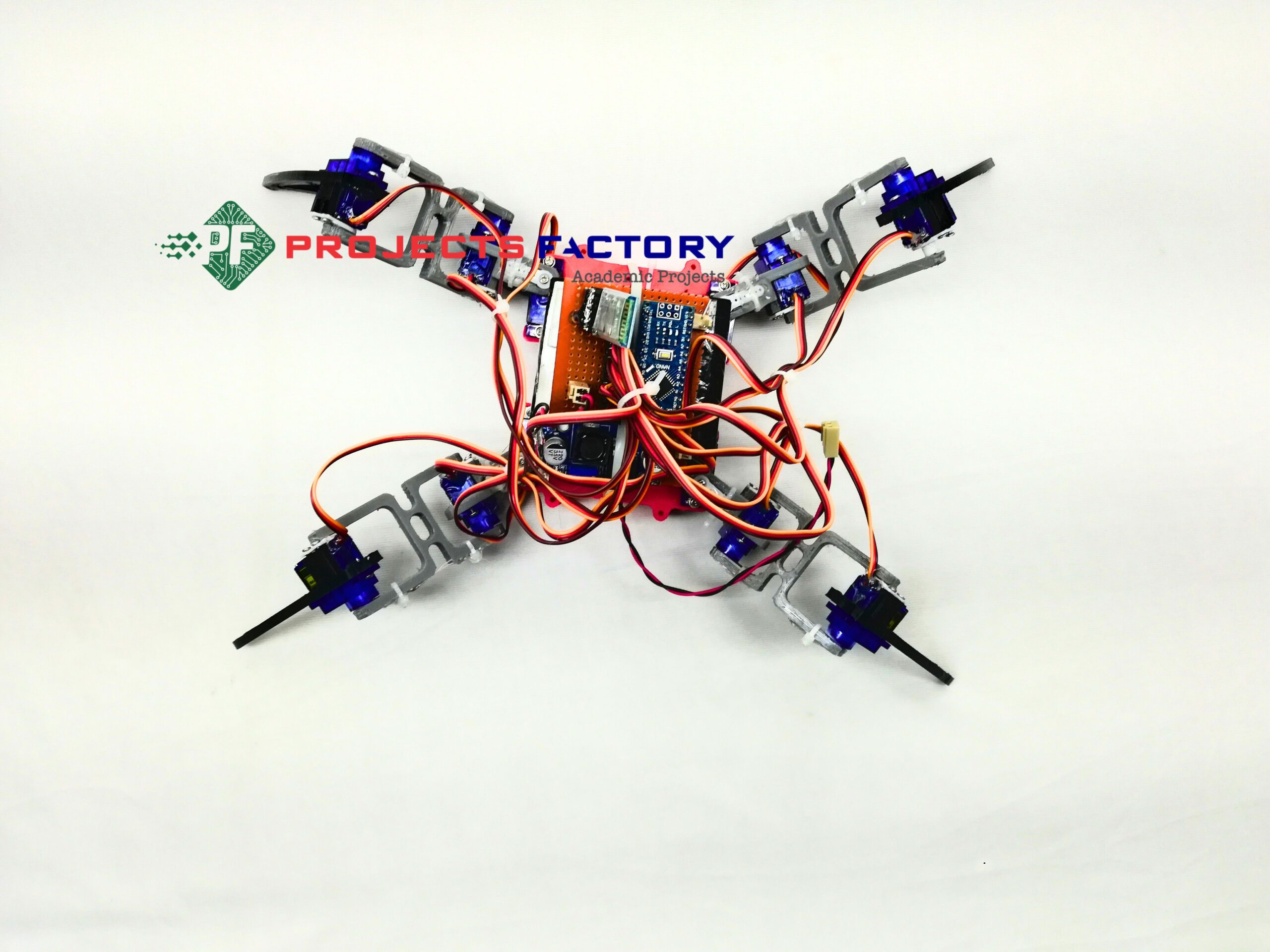
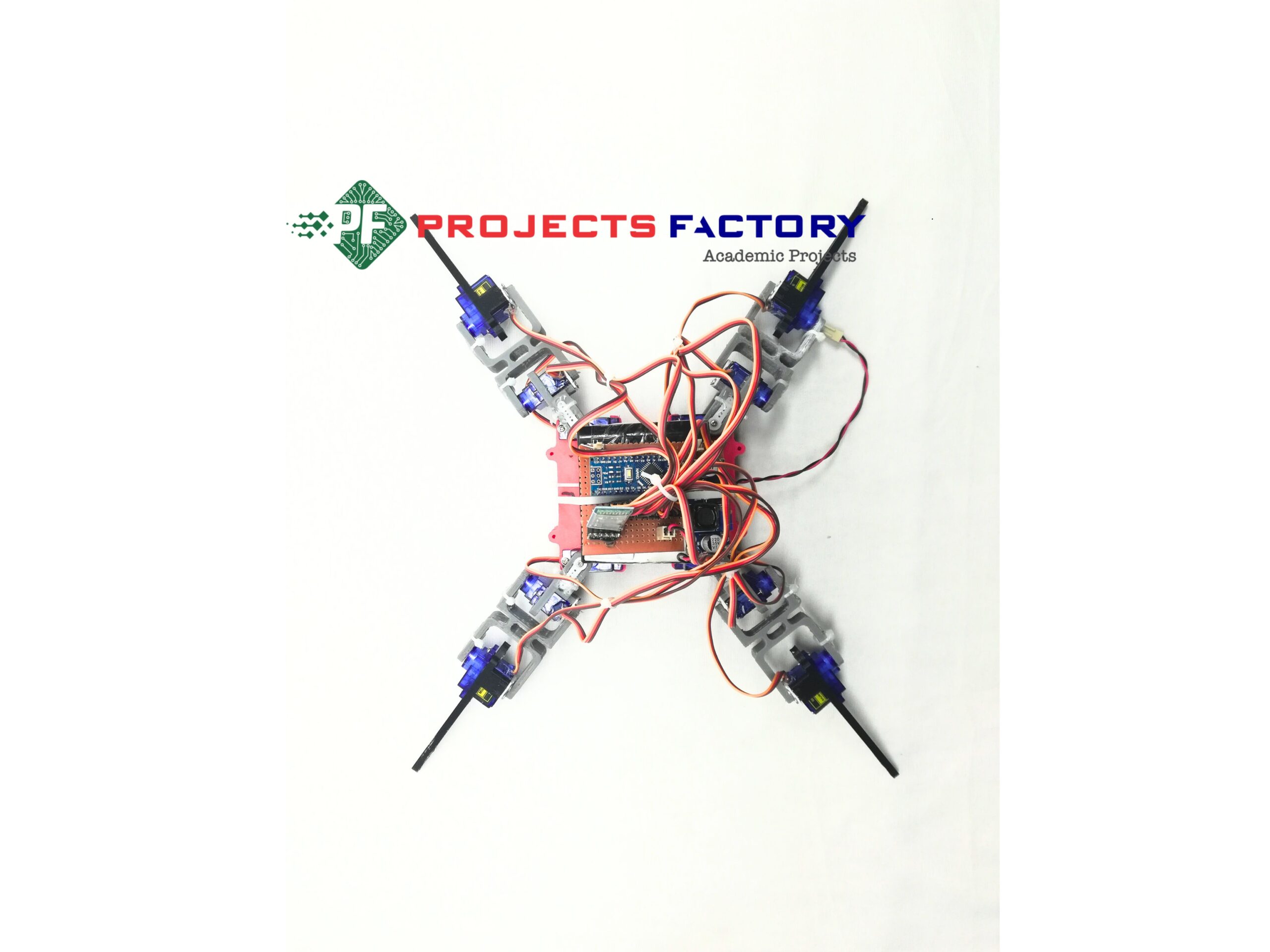
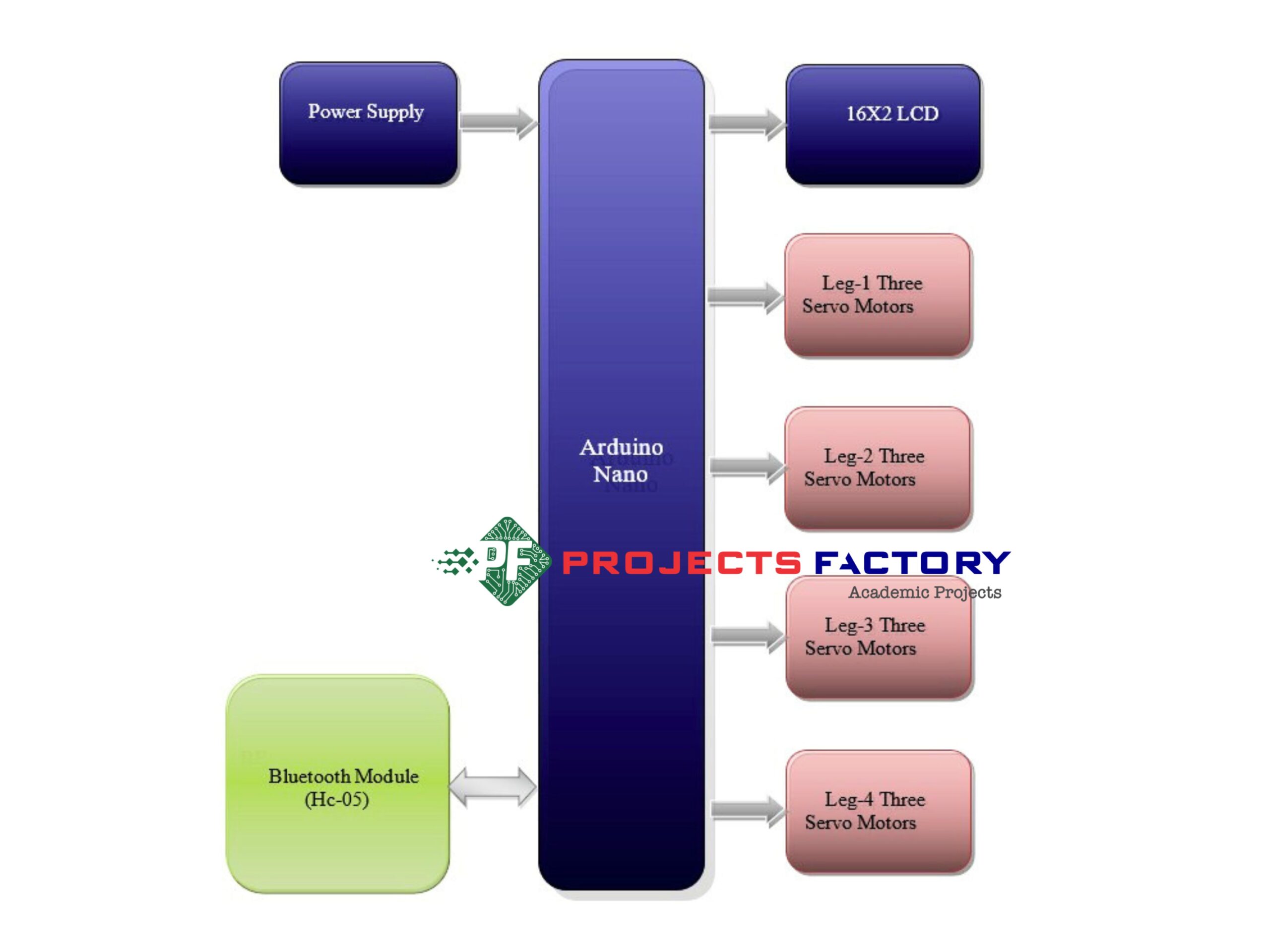
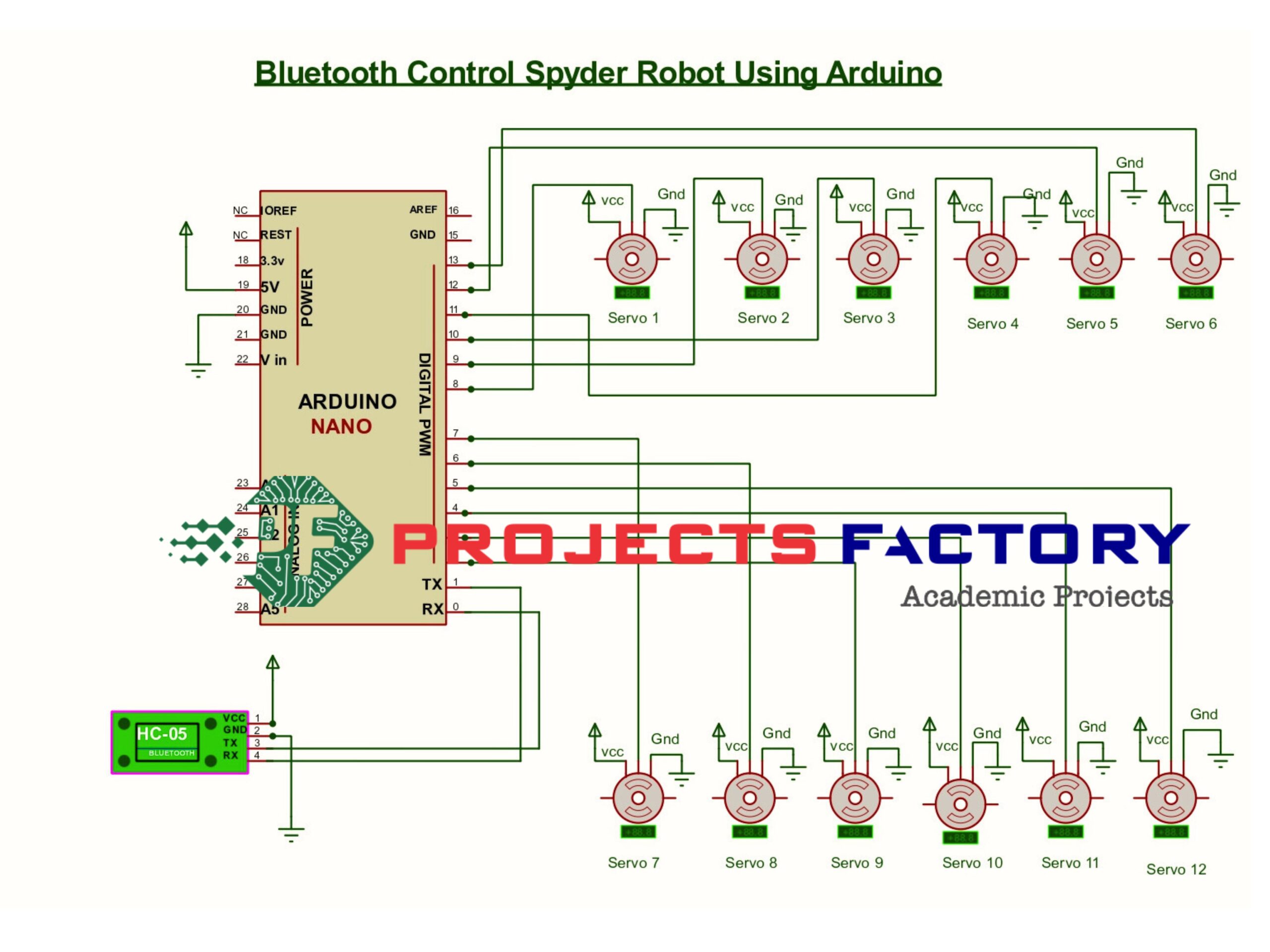
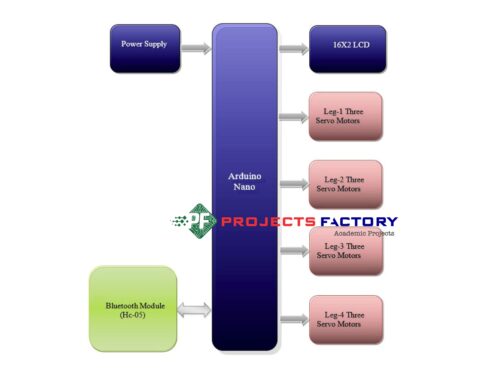
There are twelve servo motors interfaced with Arduino Nano. Bluetooth module interfaced with Arduino nano UART port.
WORKING:
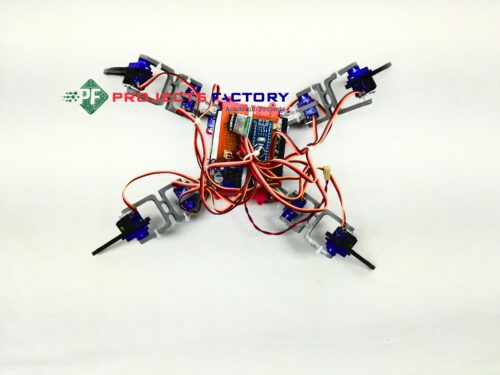
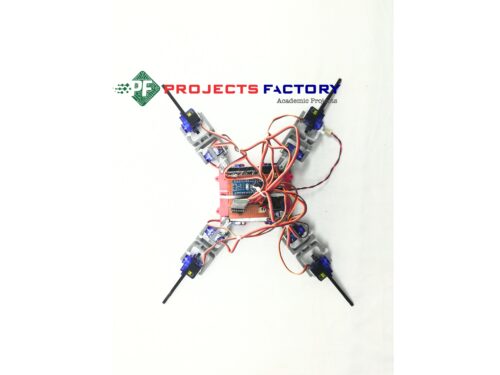
The spider robot body designed with 3D printed parts and it will crawl on any surface or terrains. There are four legs and each leg has three servo motors. With the help of these motors legs will move in required position. This Spider robot can be controlled through Bluetooth app. Based on commands from app it can move in various directions like front, back, left and right. Even it will sit, dance and giving hand (leg) gestures. All these functions done with the help of servo motors and bluetooth application.
TECHNICAL SPECIFICATIONS:
HARDWARE:
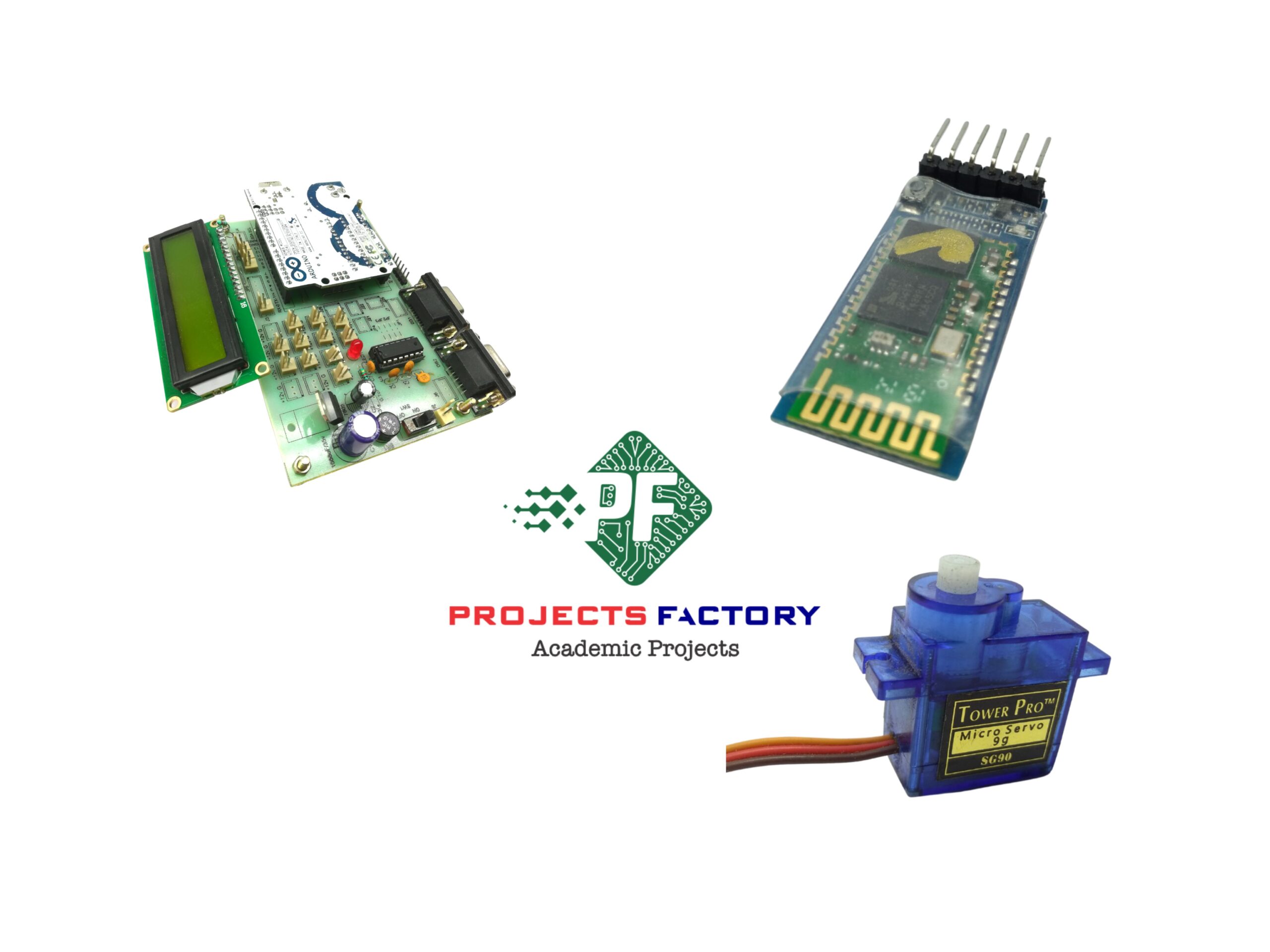
Microcontroller : Arduino Nano microcontroller
Crystal : 16 MHz
LCD : 16×2 LCD display
Bluetooth : HC-05
Servo Motor : SG90
Spider robot parts : 3D printed parts
Power Source : 12v 1 amp DC battery
SOFTWARE:
Arduino IDE
Proteus based circuit diagram
APPLICATIONS:
- Robotic Applications
- Walking robot
- Defense application robot
- Quadruped Spider Robot
- Four legged robot
INTERFACES COVERD:
- We have covered Arduino controller interface and programming
- Servo motors and Bluetooth module interface










Reviews
There are no reviews yet.