DOWNLOAD ABSTRACT
AIM:
Design and Development of War Field Spying Robot with camera rotation.
PURPOSE:
Robots are helping in war fields. Supplying foods or other things to soldiers is most important in war time. But while robot travelling in a path we should monitor all over the area around the robot. Normal cameras are static and can’t rotate any direction to monitor. Here we want to implement robot with camera and it should move in vertical and horizontal direction. Here the project title is war field spying robot with camera rotation.
DESCRIPTION:
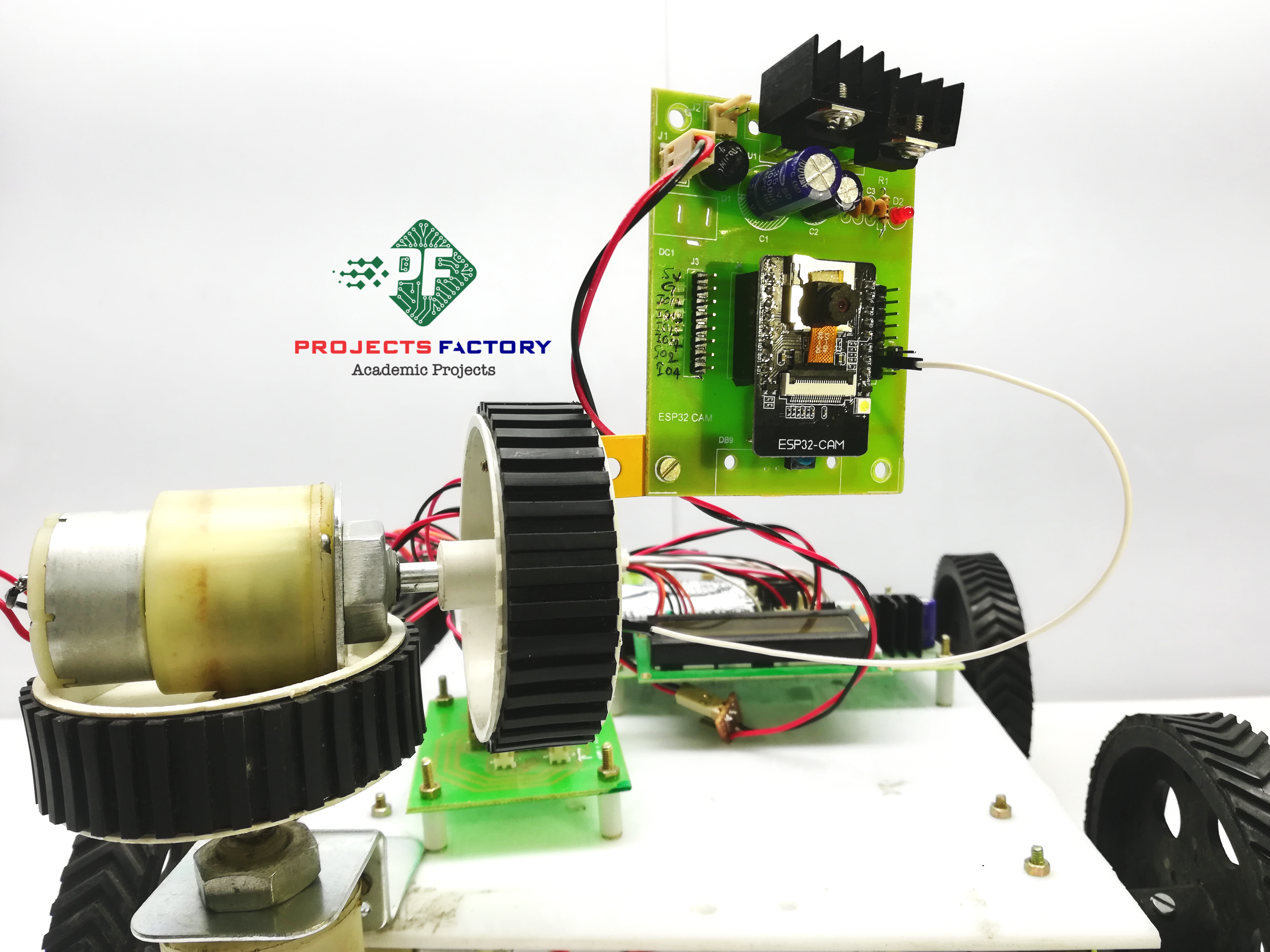
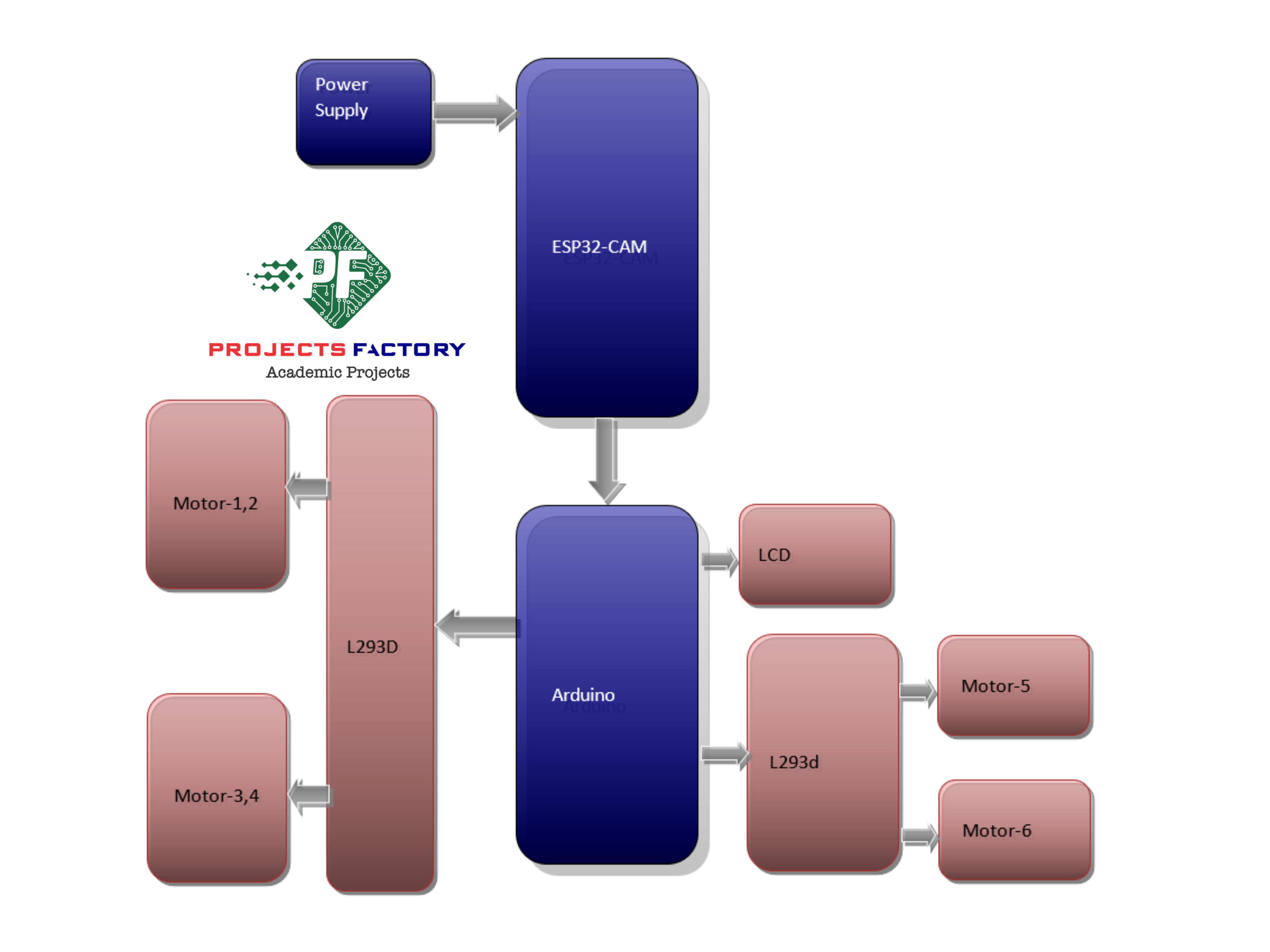
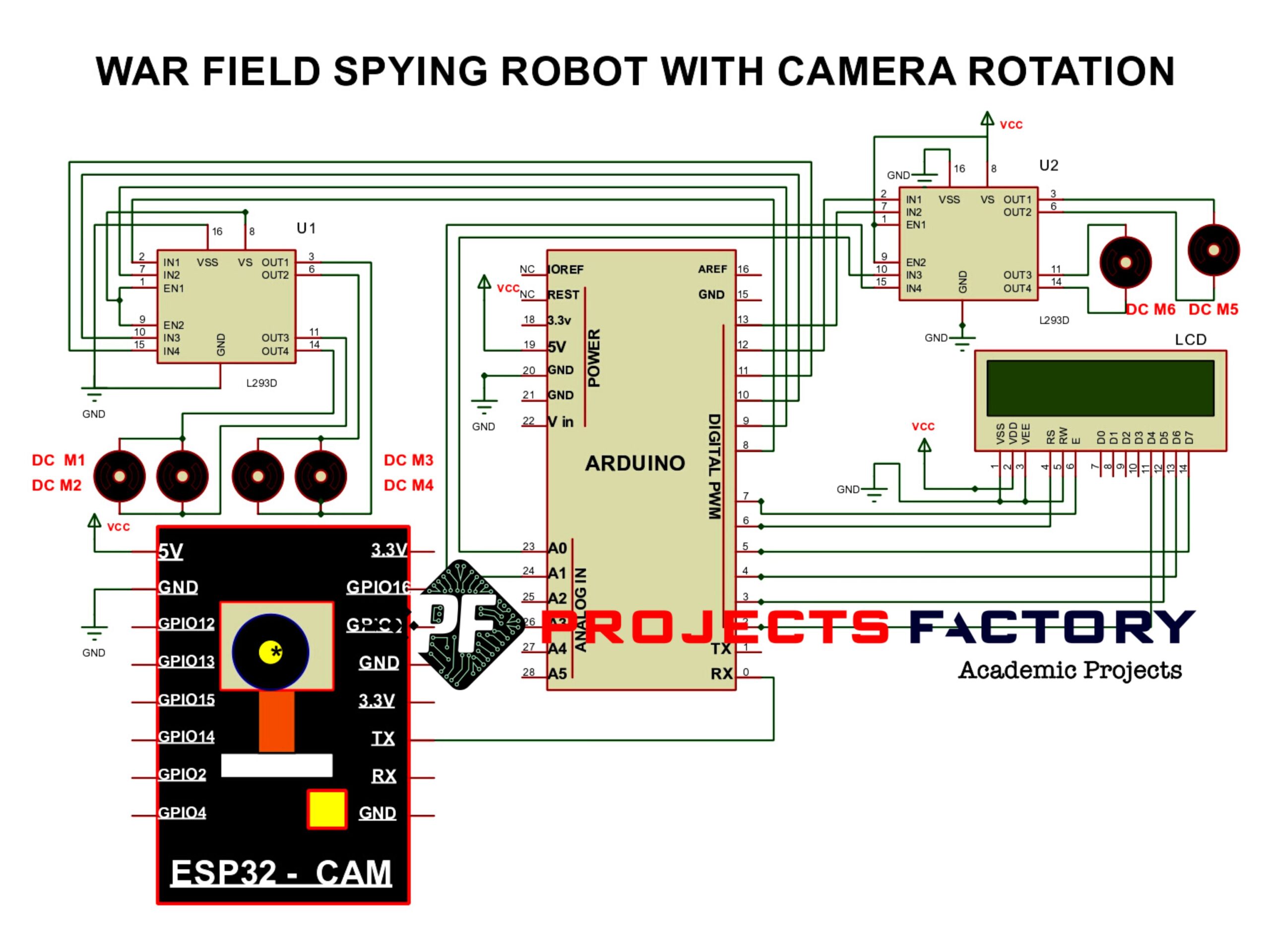
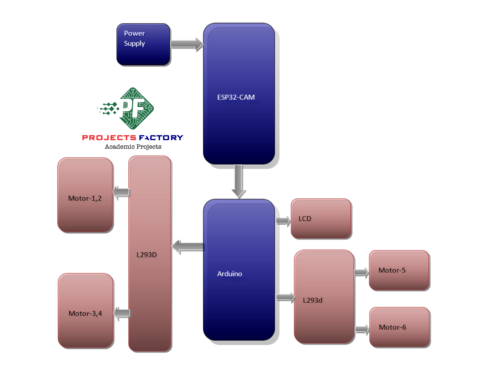
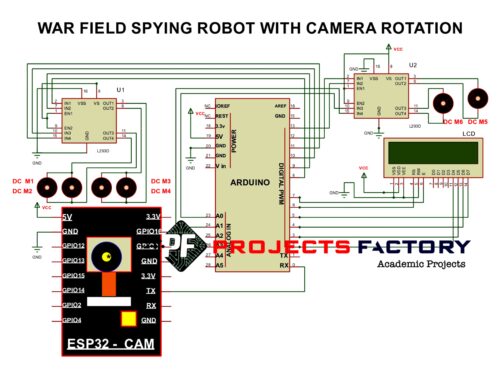
This project works with two controllers like ESP32-CAM and Arduino. Both are connected to each other through serial communication. L293D connected with Arduino digital pins. It can move motors in all the directions. Two motors for moving robot in directions like front, back, left and right. Another pair of two motors for camera moving in horizontal and vertical. We can’t connect more numbers of motors to ESP32-CAM. So here we select Arduino to control motors. ESP32-CAM and Arduino are communicating in UART communication.
WORKING:
ESP32-CAM can stream live video into web page. We can access web page through IP address. ESP32-CAM get IP address from WIFI connectivity through hotspot or WIFI modem. Using IP address we can access web page and web page contains video streaming window and robot controlling buttons. Also there are extra buttons to control camera rotation. IP address of ESP32-CAM will display on 16X2 LCD display. ESP32-CAM sends commands to Arduino to control all motors according to our requirement.
TECHNICAL SPECIFICATIONS:
HARDWARE:
Microcontroller : Esp32-Cam and Arduino
LCD : 16X2 LCD display
H-Bridge : L293D
DC gear motor : 60 r. p. m
Power Source : 12v 1 amp DC battery
SOFTWARE:
Arduino IDE
APPLICATIONS:
- Robotic Controls
- Wireless vehicle control
- Web page based robots
INTERFACES COVERD:
- We have covered Esp32-Cam and Arduino
- H-Bridge L293D and DC gear motors















Reviews
There are no reviews yet.